Luiz Cheim, Senior Principal R&D Engineer at Hitachi ABB Power Grids
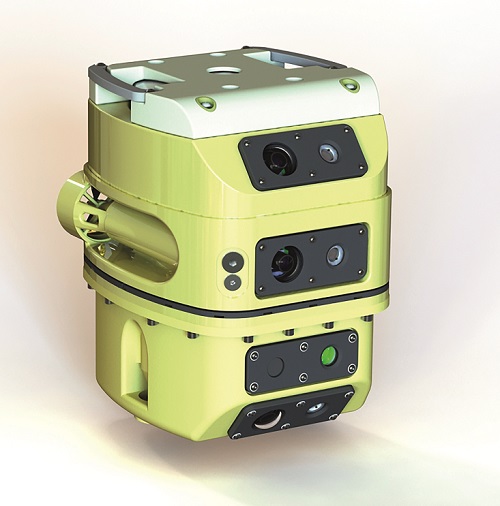
The story behind the submersible transformer
inspection robot
I think research is in my DNA, as it is for Hitachi ABB Power Grids. We are never satisfied with the world as we see it and are always thinking of better ways to do things based on innovation and technology.
Alan Ross, the Editor in Chief of Transformer Technology magazine, spoke with Luiz Cheim of Hitachi ABB Power Grids about TXploreTM, a service that utilizes a submersible inspection robot to inspect and detect problems inside fluid filled power transformers. Luiz was Alan’s guest on a recent Tech Talk, and this interview is an edited excerpt from that.
Alan Ross
I first saw a demonstration of the submersible robot service for transformers - TXploreTM, at the Doble Conference in 2018 by the now retired ABB engineer, Craig Stiegemeier. Before we get into the TXploreTM, Luiz, could you tell us a little about your background and career?
Luiz Cheim
I am originally from Brazil and my career has been a long journey. I received my electrical engineering degree in Rio de Janeiro in the 1980s and a master’s degree while working at a research institute in Brazil. I then moved to England where I worked at the Electrical Engineering Department of Nottingham University for a number of years, and obtained my PhD, before I decided to go back to Brazil, where I worked with the same research institution for another seven years. I then worked for Siemens for eight years, before I moved to Canada to join ABB and finally to the U.S., where I now work with Hitachi ABB Power Grids. I have also been heavily involved with CIGRE, serving as the head of the CIGRE Transformer Committee in Brazil from 2000 to 2006.
Professionally, I have always liked research. I think research is in my DNA, as it is for Hitachi ABB Power Grids. We are never satisfied with the world as we see it and are always thinking of better ways to do things, based on innovation and technology.
I have contributed to multiple patents in the U.S. and globally. The plaques you can see behind me at my office are gifts from Hitachi ABB, in commemoration of those patents. The submersible robot will add fifteen more to the collection, hopefully.
As for the robot, robots have been used for many years, but they have never really been applied to transformers – so that was my thinking as well.
AR
Let’s talk about the robot. I presume you were doing your research and saw a problem relating to transformers.
What was the problem that you saw and decided you were going to solve?
LC
This is quite interesting. At that time there was no product development on robotic submersibles. There was nothing of that kind. So, I was not looking for a solution to a problem. I actually witnessed a situation on site where I thought to myself: There must be a better way of doing this.
I was invited to a customer meeting that took place in a very large substation. I met the customer and the group of engineers, and they thought I might be interested to know there were my colleagues at the site doing transformer inspection. I didn’t know that because I was not involved in that activity at that time.
They invited me to meet my colleagues and see what was going on. We walked around the substation to see an internal inspection of a power transformer on a very hot day. The oil had already been drained from the transformer and I saw my colleague Eric standing there ready to start the inspection.
Internal inspection of transformers are difficult tasks in confined spaces, you need well trained people and complete compliance with required procedures to manage certain HSE (Health and Safety) risks.
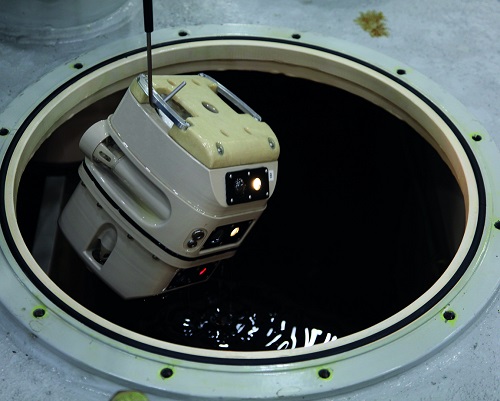
Internal inspection of a transformer takes place in a confined space where you enter through a manhole, there is not much room inside and it is dark, with an oily smell and oily surfaces and with the oxygen content being monitored to make sure the atmosphere inside is breathable, with dry air typically pumped in.
Eric came out sweating from the transformer. As I stood there, he would go back in and come out in intervals of 15 minutes. And I thought to myself, there should be better ways to do this.
This wasn’t the first time I had seen that. I had seen inspections before and even took part in a couple of them with my previous employer. But for some reason that day, because of the circumstances and the hot conditions, I went back to the office and thought, we have to do this differently.
And this is how the idea was born. I started searching online asking myself: Is there a rulebook on how to solve this problem? Is there a camera that we can send into transformers? I started digging, looking at pictures. The first thing I found was a submersible 360-degree camera, and I thought, maybe we can use this.
I started brainstorming, and this is one of the reasons why Hitachi ABB Power Grids is first class. The company has what is called The Innovation Database. So, I started sketching the idea of innovation because I knew we had to do this differently. We need to send a machine, not a human, inside the transformer. What would be the advantages of that? Obviously, we don't risk the health of an employee. Maybe, if we do it successfully, we could save time so the customer would benefit from having a much lower downtime.

I then took the idea of a submersible camera to a few very experienced colleagues, and they thought that customers and transformer owners would never allow a foreign object to be inserted into their five-million-dollar asset. You should forget about it, some said.
What was needed was a change of paradigm because there was no idea like it before. But one colleague from Switzerland had a vision and he said, Luiz, I think we have something here that is a paradigm changer!
The robot can dive and go deep into places a human cannot reach and send a very good image of what it sees. The spectrum of views can be observed and jointly analyzed by the designers of that very same transformer, as the inspection is happening, anywhere in the world.

He started discussing it internally and asked me how I was planning to do this. I said I had no idea; I am just a transformer guy! I am heavily involved with R&D working with algorithms and machine learning, but I don't know how we are going to do this. We then planned to bring the expertise we had in-house from our robotics team, who had nothing to do with transformers, but they were looking for internal projects they could apply their know-how to.
We brought them to the St. Louis factory in the U.S., presented my proposal and they said, Wonderful, let's do this together!
At this point I have to say, yes, I was the generator of the idea, but I had a huge support from our entire organization bringing together the transformer knowledge from the TRES group – now called Transformer Components and Services (TCS). Craig Stiegemeier, for example, was in that group and he was very supportive all the way, as was the robotics team.
Obviously, we needed the material support, but without the robotics team, this would just have been a good idea stuffed in some drawer somewhere. They embraced the idea and put a lot of energy, people and money into it. Our two groups worked together for the first time ever.
We created a steering committee that included a few people from the robotics team and a few from our team, myself and Craig Stiegemeier included.
The steering committee was there to make sure that the resources allocated to the project were properly distributed and that we had the right people for it, as we were on a journey to develop a technology.
Yes, robot technology was available, but not for transformers. There was no robot that could navigate inside mineral oil and clearly see things that are designed by electrical and mechanical engineers.
It took us four years from the day I saw Eric at that substation to develop the first prototype that we started to test on real transformers.
Don't do what you've been doing for a hundred years just because that is the way you have always done it.
AR
The fact that ABB at the time allowed the persistence and spending of time, money, and human resources for four years to get there speaks volumes about the company’s commitment to a new future.
If I were a customer with a five-million-dollar transformer that I was planning to shut down and open up, and spend thousands or even hundreds of thousands of dollars, bringing in all these people, what would you tell me after your four-year journey?
LC
Don't do what you've been doing for a hundred years just because that is the way you have always done it. Always ask yourself: What is a better solution? This is almost academic. You don’t need to send people to such inhospitable environment for 15 minutes at a time. During the inspection, the expert also has to take nice pictures. He has to go in with a camera and take good shot even if the lighting is poor. And these shots have to be of high quality so that people like you and me can clearly see if there is a problem or not. It takes a very skilled person to do that, which is what Eric was.
Obviously, the expert also needs to understand the transformer, the design, and what we are looking for. You also might need to get a permission from the planners or operators to disconnect the transformer. Then you have to count on a downtime of three to six days.
The number of variables and the costs can be huge. If you can do all this in a matter of hours instead of days, that makes good sense, doesn’t it?
In the next decade I do not expect to see one single transformer being inspected in conventional ways because I do believe that this technology is here to help people and companies to reduce and minimize risks and costs, and to optimize downtime. You can do it properly and the robot can get to places that no human can.
There were so many factors that we had to specifically develop for this robot, that we ended up with 15 patents.

The robot can dive and go deep into places a human cannot reach and send a very good image of what it sees. The spectrum of views can be observed and jointly analyzed by the designers of that very same transformer, as the inspection is happening, anywhere in the world. The robot is able to communicate all the images – which was one of the 15 patents of this project. Processing of the images and the speed of communication between the robot and the outside were one of the difficulties we had to overcome.
AR
What were other problems the team had to overcome?
LC
There were a number of technical problems that took us a while to solve.
We know that oil and gas companies around the world use robots for inspection and repair, but the transformer robot is going into mineral oil, not water. So, the material used to build the robot had to be compatible with oil to avoid any interaction with the oil that would create a chemical reaction. We had to search for ideal materials to utilize.
Another very important issue is that if anything happens to the robot, you need to be able to recover it. If, for example, there is a part of the robot that comes off, it will stay hidden somewhere inside the transformer. This part has to be easily recoverable, so the robot needs to be able to capture and contain its own parts if they become loose and fall off.
Another problem was navigation through the oil, which has to be highly controlled to avoid creating any bubbles in the transformer. The propellers on the robot cannot generate bubbles of any kind.
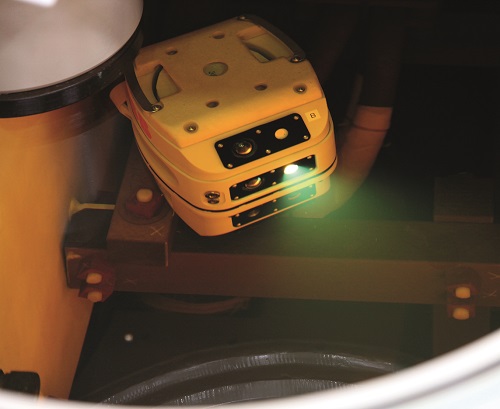
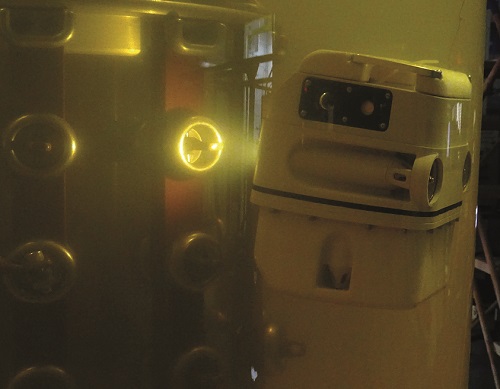
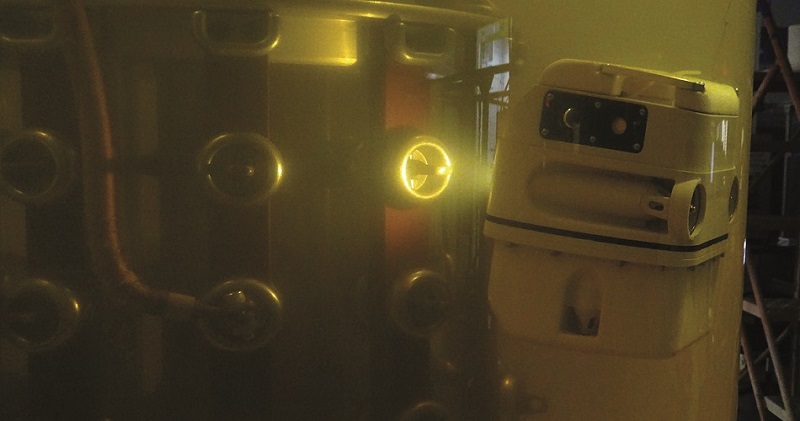
And, finally, high-quality vision. This was one of the most difficult issues as the oil can get really dark with age, so the robot needs special vision and special lighting.
There were so many factors that we had to specifically search for or develop for this robot, that we ended up with 15 patents. Everything we designed for navigation in mineral oil had to be new, created from scratch. One new idea generated many other ideas, which made the entire process particularly interesting.
In the next decade I don't expect to see a single transformer being inspected in a conventional way because I believe that this technology is here to help people and companies to reduce and minimize risks and costs, and to optimize downtime.
AR
Nowadays OEMs are trying to reduce the size of transformers, making it harder for operators to get inside for inspections. Once the robot was born, how did you get it to the market?
LC
After the robot was developed it was down to our marketing people, the sales force and the strategic minds behind the organization to decide how to use it. The robot is used as a service offered by Hitachi ABB Power Grids, TXpertTM Services, part of the TXpertTM Ecosystem; it is not sold as a product. Several of our Transformer Service Centers now offer this Service across the world. We already have successful cases reported in Australia and other parts of the world.
AR
Tell me a little bit about how it was used, what the problem was, and how using the TXploreTM solved that problem.
LC
There are many cases, but this particular case in Australia was interesting because the transformer owner suspected that the load tap changer (LTC) had an issue due to the DGA (Dissolved Gas Analyzer) data, so they decided to do an inspection. We used the TXploreTM and it took some four to five hours to complete the entire process.
The robot found nothing and was able to provide very good pictures of all the accessible parts of the LTC. Since nothing was detected, the client just placed the transformer back in service. So, this was a positive case, where there was no need for further inspection.
AR
An LTC inspection can be expensive. Also, we know that often when you try to do maintenance or inspections on something that doesn't have a problem, many times we create a problem. So, it is brilliant to be able to say, the unit is not broken, put it back into service.
LC
When our two teams, the transformer services group and the robotics team, decided to work together, our service team operated as the customer who needed a solution. We gave them the constraints because we understood transformers, and they knew robotics.
For example, we told them that when the robot moves around, it can cause damage. If it touches the solid insulation, we don't want it to scratch the paper. So, ideally, the robot would be a sphere. And the first model actually was a ball. But then, if the robot is too big, it might not be able to navigate properly. So there were several steps in the development of the ideal prototype.
Once the prototype was completed, I was no longer involved in the product development, which was a very important phase as well. The robotics team completed the job to design and manufacture the product.
You can have a brilliant idea, but if you don't have the resources, the people, or the support; or even if you do, it is not so easy to make everyone work together. This is why I am so grateful for a company like Hitachi ABB Power Grids, because where else can you find this?
They needed drawings, components, spare parts, whatever electronics was needed and a place for the robot to be built. So, the robotics team turned it into a real product which they supplied to us.
AR
I was impressed with the ability of the light and camera function, regardless of the color of the oil. I applaud whoever figured out how to do that.
LC
It's a special camera, yes. The quality of the images is impressive. Whoever has seen the robot in action, as you have seen it, they must admit it is impressive. I learned a lot from the robotics team, and they learned a lot from our business as well, in the process of working together for the first time.
This is why I am so grateful for a company like Hitachi ABB, because where else can you find this? You can have a brilliant idea, but if you don't have the resources, or you don't have the people, or the support; or even if you do, it is not so easy to make everyone work together if they are totally independent and different businesses as we were and still are.
AR
Luiz, over your career you have made a commitment to the advancement of knowledge through IEEE, CIGRE and to the next generation, so on behalf of all of us at Transformer Technology, thank you. You have been a great guest. Thank you so much.
To find out more about TXploreTM, visit the official webpage.
Watch and listen to the TechTalk with Luiz Cheim:
![]()